


 AVR Deices – конструкции на микроконтроллерах AVR и не только…
AVR Deices – конструкции на микроконтроллерах AVR и не только…
Habe vor kurzem die Hardware auf meinem Server gewechselt, und habe eine Verzeichnis mit alten Fotos entdeckt, die noch in der Zeit meiner Vor-Vor-Vor-Vorheriger Frima gemacht wurde. Damals habe ich einen Ausstellungsstand gebaut, um unseren Kunden zu zeigen : "So können wir auch!"
Und weil es schon mehr als 6 Jahre vorbei sind, kann man schon darüber erzellen. Da gibt es keine Geheimnisse mehr.
Also, los gehts...
die Gedanke war zu zeigen, dass wir mit dem Bus FlexRay arbeiten können. Das ist ein serielles, deterministisches und fehlertolerantes Feldbussystem für den Einsatz zum Beispiel im Automobil.
So weit ich weiss, das Bus ist im BMW X5 eingesetzt.
So, der Task ist definiert, und ich habe gedacht, warum denn nicht, einen Fahrrad noch mal zu erfinden. Und habe vorgeschlagen einen Projekt zu bauen, wo man mit einem Lenkrad über 2*2 Drähte die Räder steuert. Die Chefs haben zugesagt, und haben auch bisschen Geld dafür ausgegeben.
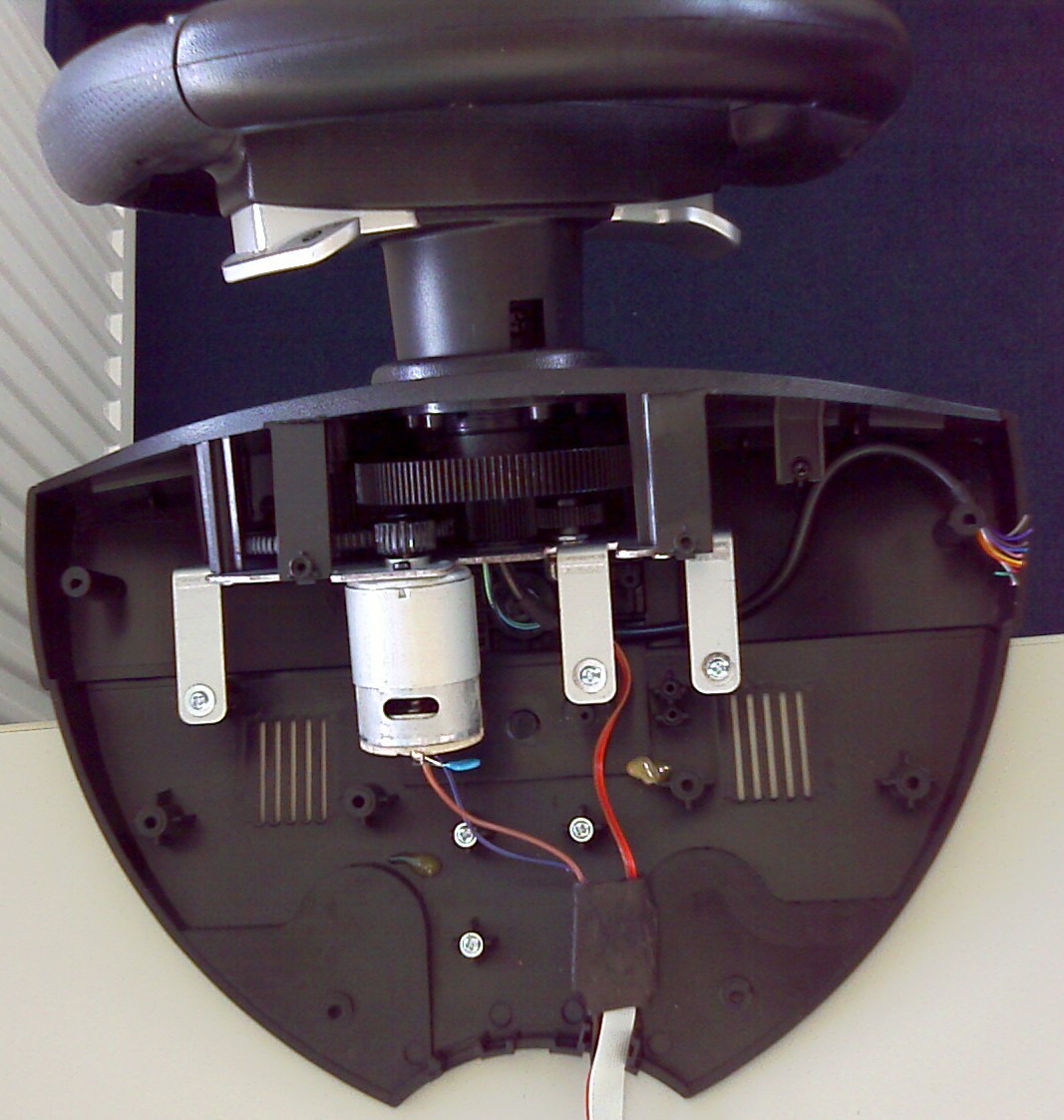
So. Den Lenkrad selbst habt Ihr schon mal gesehen da oben. Ich habe so einen mit dem Fiedback ausgewählt, und die ganze Elektronik, außer den Motor und einen variablen Wiederstand, rausgeschmissen.
Dann habe ich einen Motor bei Lego gekauft, und dort einen variablen Wiederstand eingebaut.
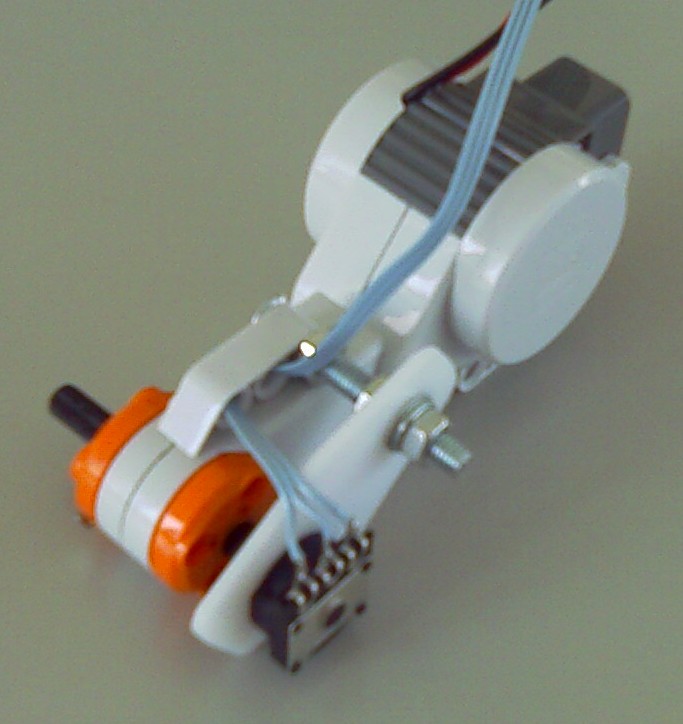
Der Motor wird danach die Räder am Automodel steuern.
Für das Automodel habe ich einen lüstigen Monster Truck gewählt, mit den großen Rädern, so dass man die anfassen kann um die zu drehen. Das Model muss man noch zusammen bauen.

Und man müsste das ganze irgendwie am Tisch schön und richtig fest zu platzieren. Dafür habe ich aus Alu Profile so einen Rahmen gebaut. Übrigens, dass ist das teuerste Teil des Projekts gewesen.

Während ich die Karosserie und Rahmen zusammen gebaut hatte, habe ich parallel die Software für zwei Eval-Boards geschrieben und getestet. Die ganze Namen und Bezeichnungen den Eval-Boards und auch den CPUs habe ich seit 6 Jahren total vergessen. Aber man muss sagen, dass die CPUs ganz gut mit der Peripherie ausgestattet sind: FlexRay Kontroller, ADC, PWMs, mindestens 4 gab es, da es zwei Motoren angesteuert werden müssen. Es sind auch vollständige H-Bridges auf den Platinen drauf.
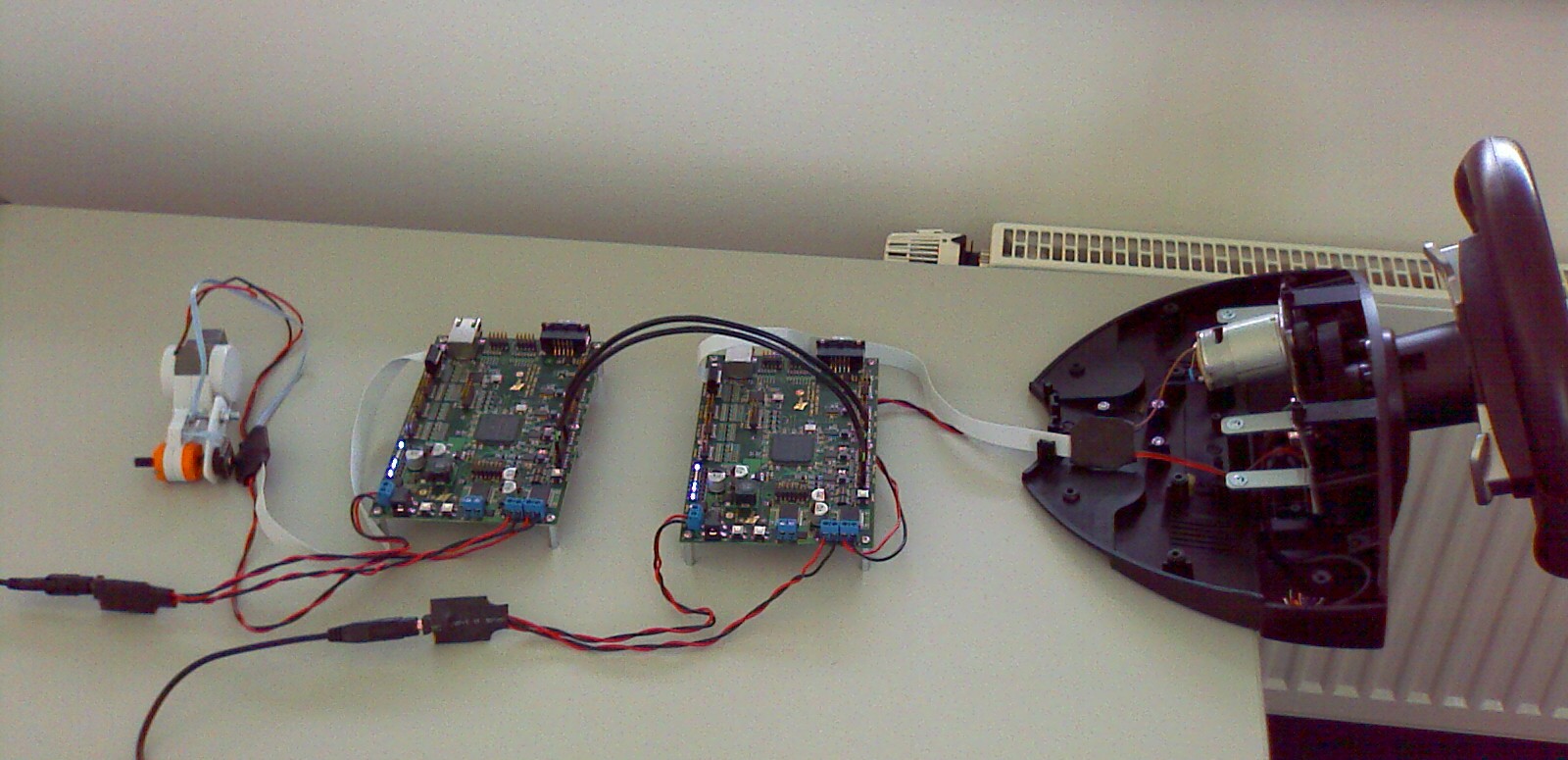
Und es ist noch geblieben, das ganze zusammen bauen.



Es ist ja echt schade, dass ich das Video von dem Arbeitsprozess nicht aufgenommen habe. Also, Ihr müsst mir glauben, dass wenn man den Lenkrad dreht, dann drehen sich die Räder, und umgekehrt, wenn man die Räder dreht, dann dreht sich den Lenkrad.
Ah. Habe ganz vergessen. Zum Schluss, nach ca. 1 Monat, hat man mich gebeten, auf Basis von einem Industrie PC mit internen Sniffer Karte für FlexRay Bus, die Software zu erstellen, die dann den Bus lauscht und alle Daten, die da fliesen, ausgibt.
Kein Problem. Mit der Hilfe des QT Bibliothek habe ich so eine Software erstellt und auch einen Zeiger dazu gefügt, der dann die Richtung dem Rädeln zeigte.
Im Jahr 2009 wurde dieses Ausstellungsstück sogar bei der Messe Embedded World dargestellt. Ich habe den Stand sogar fotografiert, leider finde ich die Fotos davon nicht mehr.
Also, falls jemand im Februar 2009 bei der Messe im Nürnberg gewesen war, und bei dem Stand der Firma ICT vorbei gegangen ist, und sogar die Fotos von dem Austellungsstand gemacht hat, bitte, schickt mir die Fotos. Ich werde dafür sehr dankbar.
Also, für Heute ist es alles
Bis Bald.



Оставить комментарий или два
Пожалуйста, зарегистрируйтесь для комментирования.