
 AVR Deices – конструкции на микроконтроллерах AVR и не только…
AVR Deices – конструкции на микроконтроллерах AVR и не только…
Сбылась мечта детства 🙂 построил радиоуправляемый вездеходик.
Точнее еще не до конца построил. Но он уже ездит. А это было первым шагом к мечте. И он сделан.
Далее будет много фоток, с небольшим описанием изображенного.
Все началось с того, что...
точнее не так. Этому предшествовало несколько шагов: 1 — на аукционе e-bay я нашел ванну с моторами и гусеницами по довольно таки гуманной цене, 2 — на одной из работ выкидывали некондиционные аккумуляторы, для которых я тут же собрал заряжатор на базе BQ24721C.
Изначально он выглядел вот так:
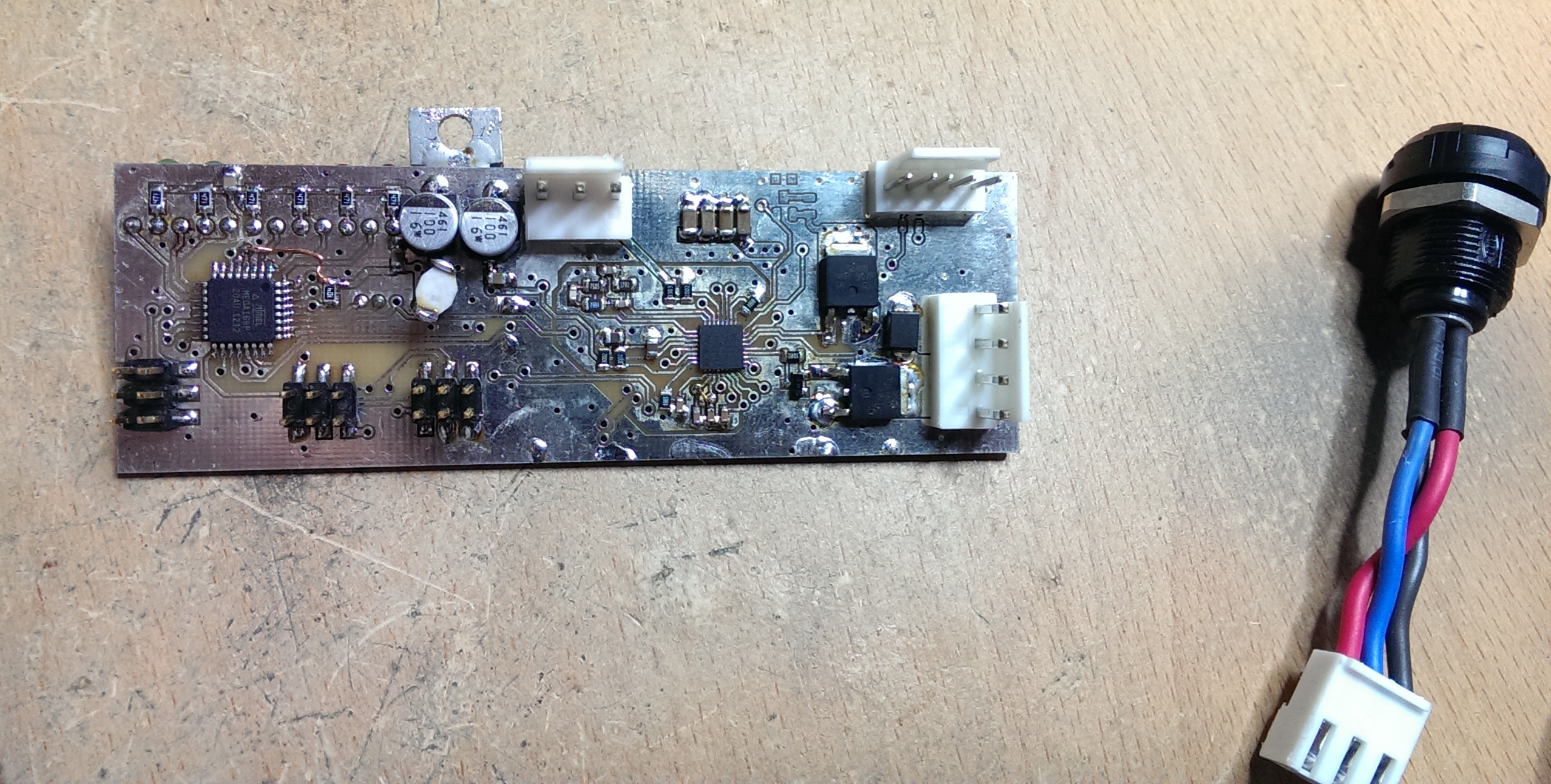
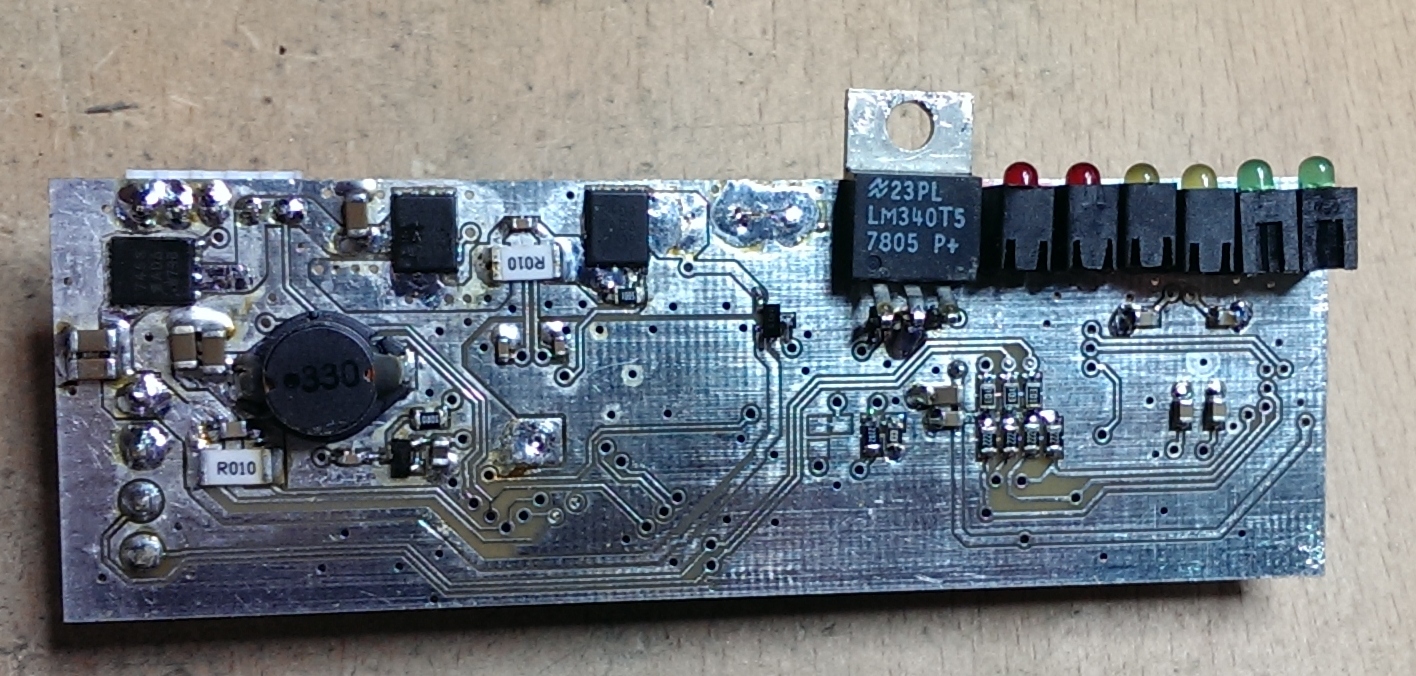
Но когда я стал заряжать им аккумулятор, то выяснилось, что жутко греются силовые МОСФЕТы и линейный стабилизатор. Тогда я ему вкорячил радиатор на МОСФЕТы и из куска меди, что валялся под рукой согнул вот такую загогулину и, предварительно прикрутив болтиком, припаял её к этому самому линейнику:
Далее был посещен мой любимый магазинчик Conrad, где раньше был супер отдел (сейчас его почему то убрали) — по дешевой бросовой цене отдавали сломанные, или бывшие в ремонте да не отремонтированные запчасти, игрушки, и прочие электронные и не только вещи. И среди них нашлись два пульта, подсоединяемые посредством USB к компу, для обучения управлением моделей самолетиков но на компе, чтобы дорогие модели сразу не угробить:

Ну я, само собой, поигрался в эти симуляторы, да чего то надоело. Так он и валялся у меня до поры до времени.
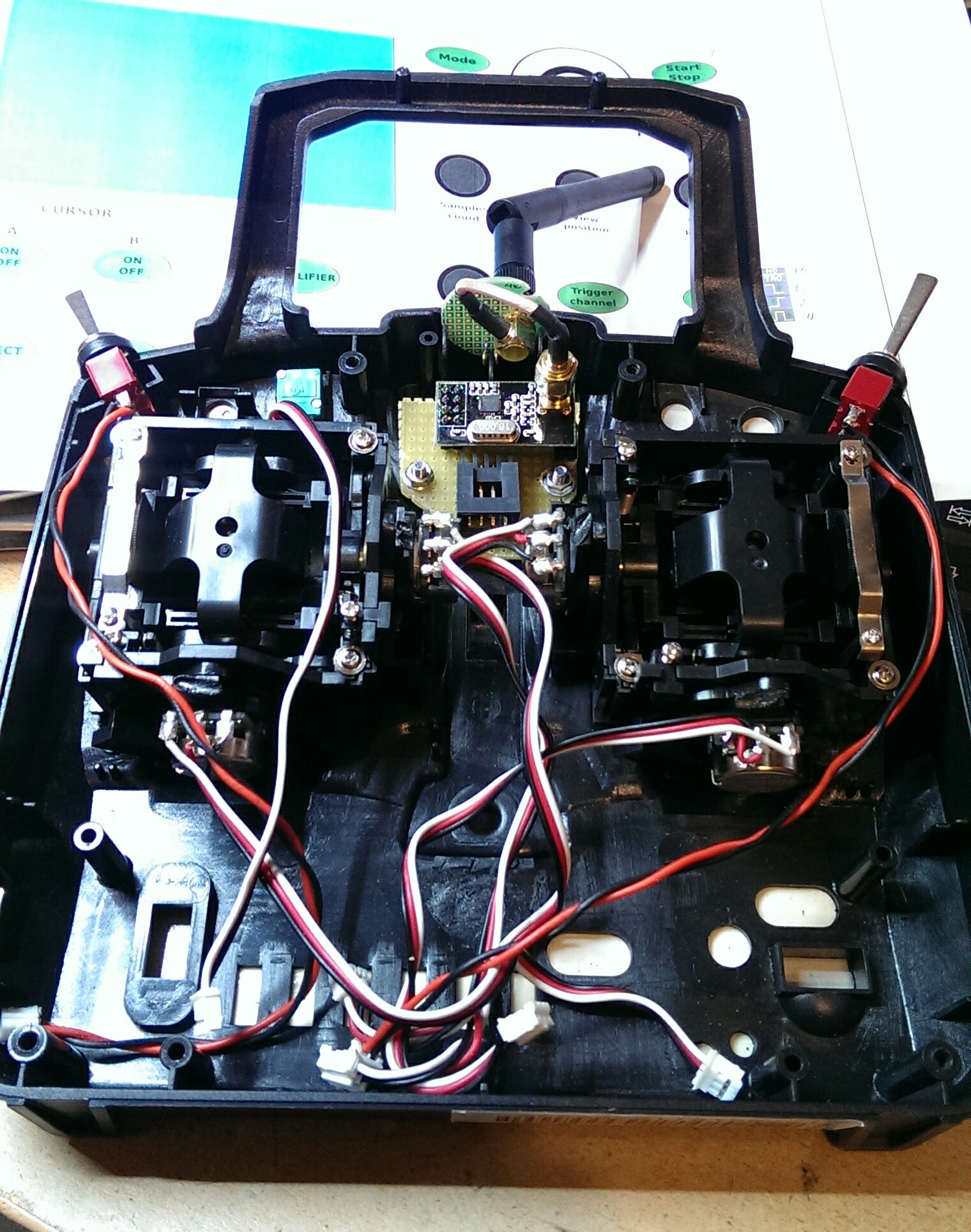
И вот время подоспело, идеи созрели, руки дошли, и... выкинул значит, я начинку этого пульта (там была мелкая платка), и воткнул, для начала, модулек с передатчиком/приемником nRF24L01, да антеннку моднячую прикрутил:

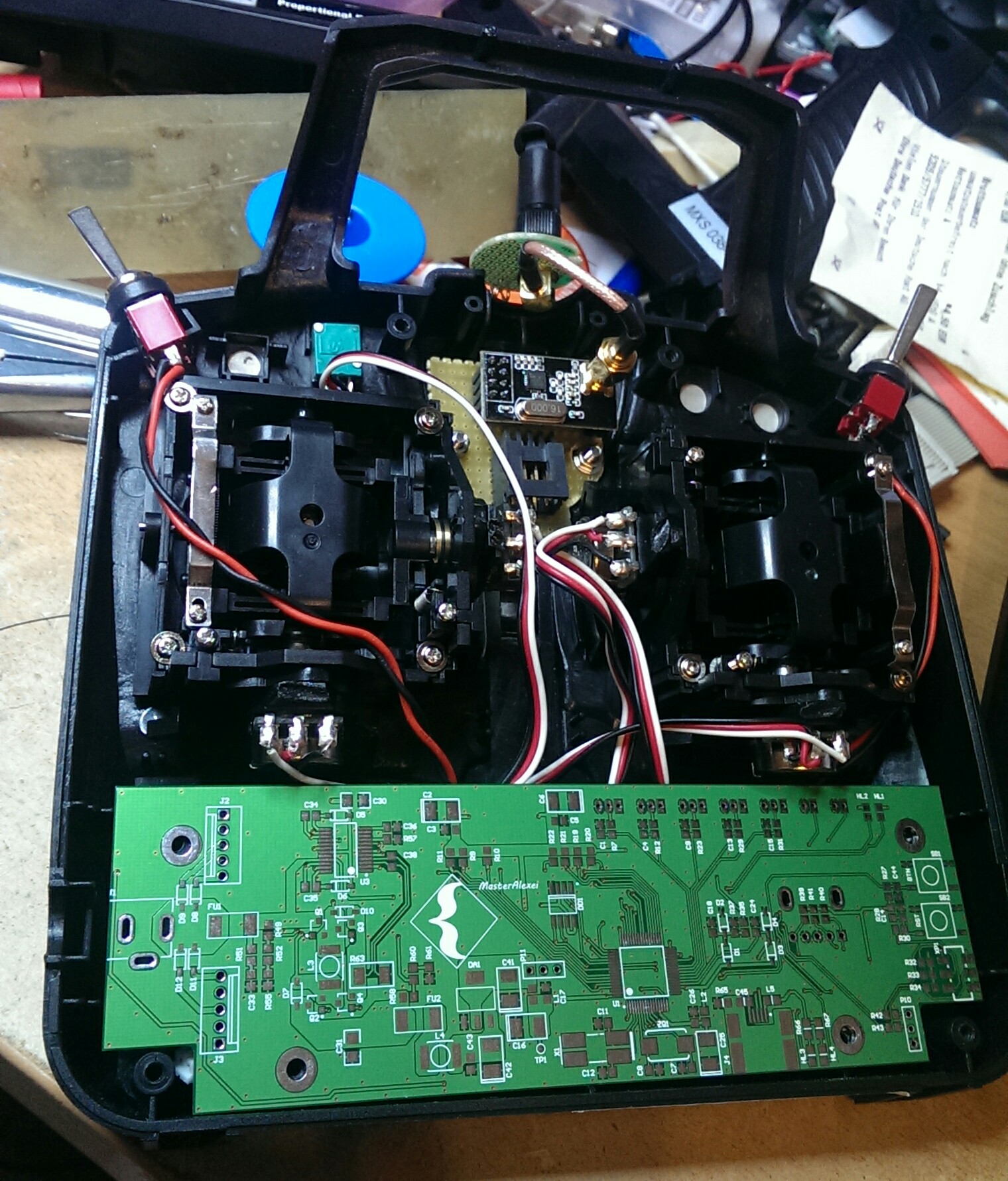
Само собой, этому всему надо бы управленца. В его роли выступил STM32F401, поставленный на хитрую платку. Платка выглядит вот так (эт я примерял только что пришедшую платку):
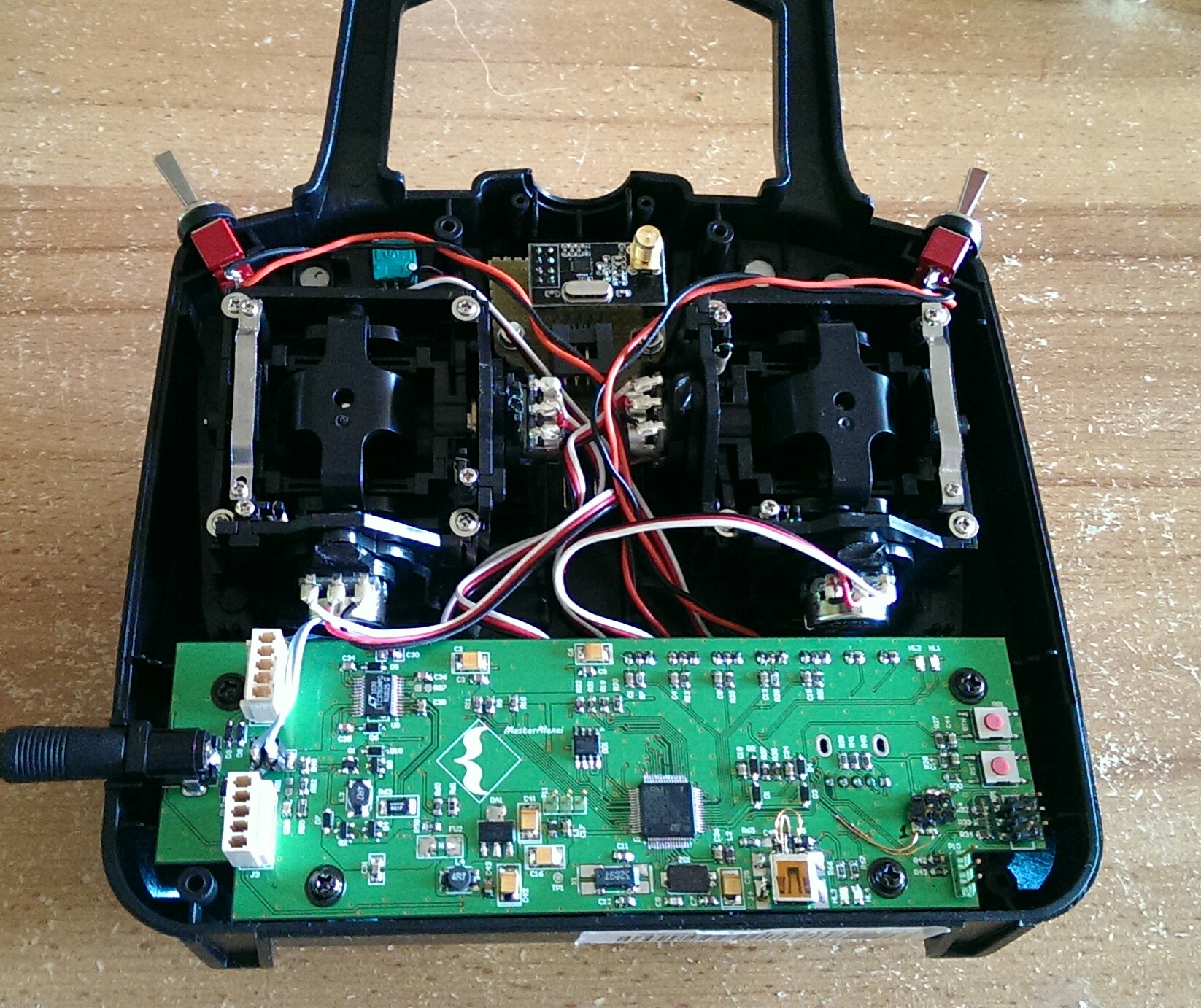
А вот уже спаянный вариант:
У пульта, что самое классное, был отсек для батареек. Т.е. вполне себе нормальный пульт, только вся начинка переделанна была для работы с USB. И в отсеке для батарей, не было контактов. И это дало мне некоторую свободу по подключению их (8 штук аккумуляторов), в две банки по 4-е аккума, и эти две банки параллельно (через встречные диоды). Что дает нам 4.8 вольт, и если аккумы взять примерно на 2700 мАч, то получается что-то около 5000 мАч. Из этих 4.8 вольт я с помощью LTC3780G конвертора делаю 4 вольта, потом LDO-шкой понижаю до 3.3 и все это отдаю процу, дисплейчику от нокии 3310/5110 и nRF-ке. Вот собственно и все с пультом.
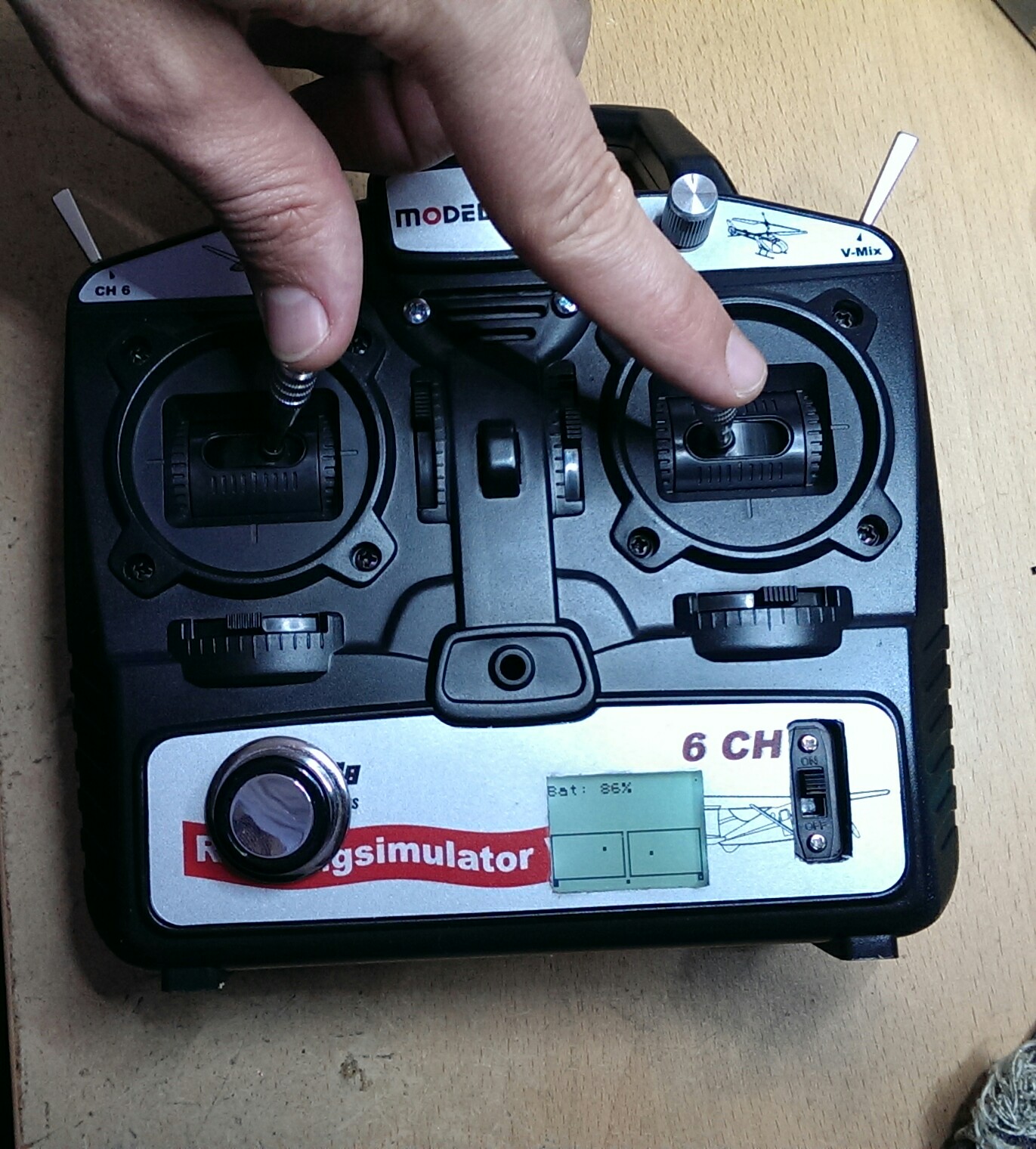
Вот так вот он работает:

Осталось дело за малым, собрать сам вездеходик, чтобы пульт к нему подсоединить.
Для начала примерим то, что есть:
И начнем собирать основную платку. Я подготовил несколько плат, так как планы у меня далеко идущие, но обо всем по порядку. Вот, значит, платки пришли. Именные 😉
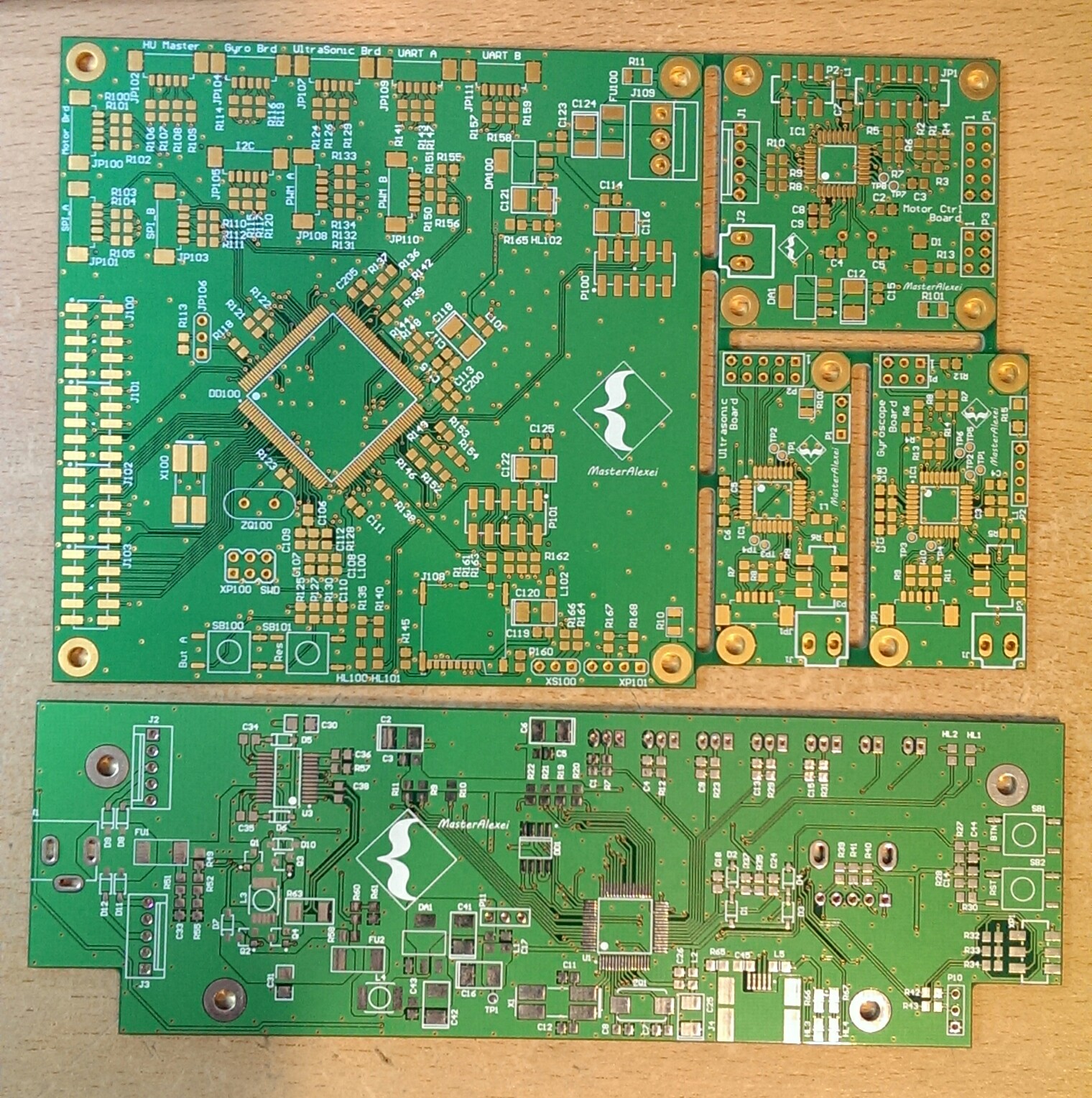
Ну про платку пульта уже поговорили, покажу процесс изготовления остального.
В принципе, ничего особенного тут нет, впаиваем детальки:
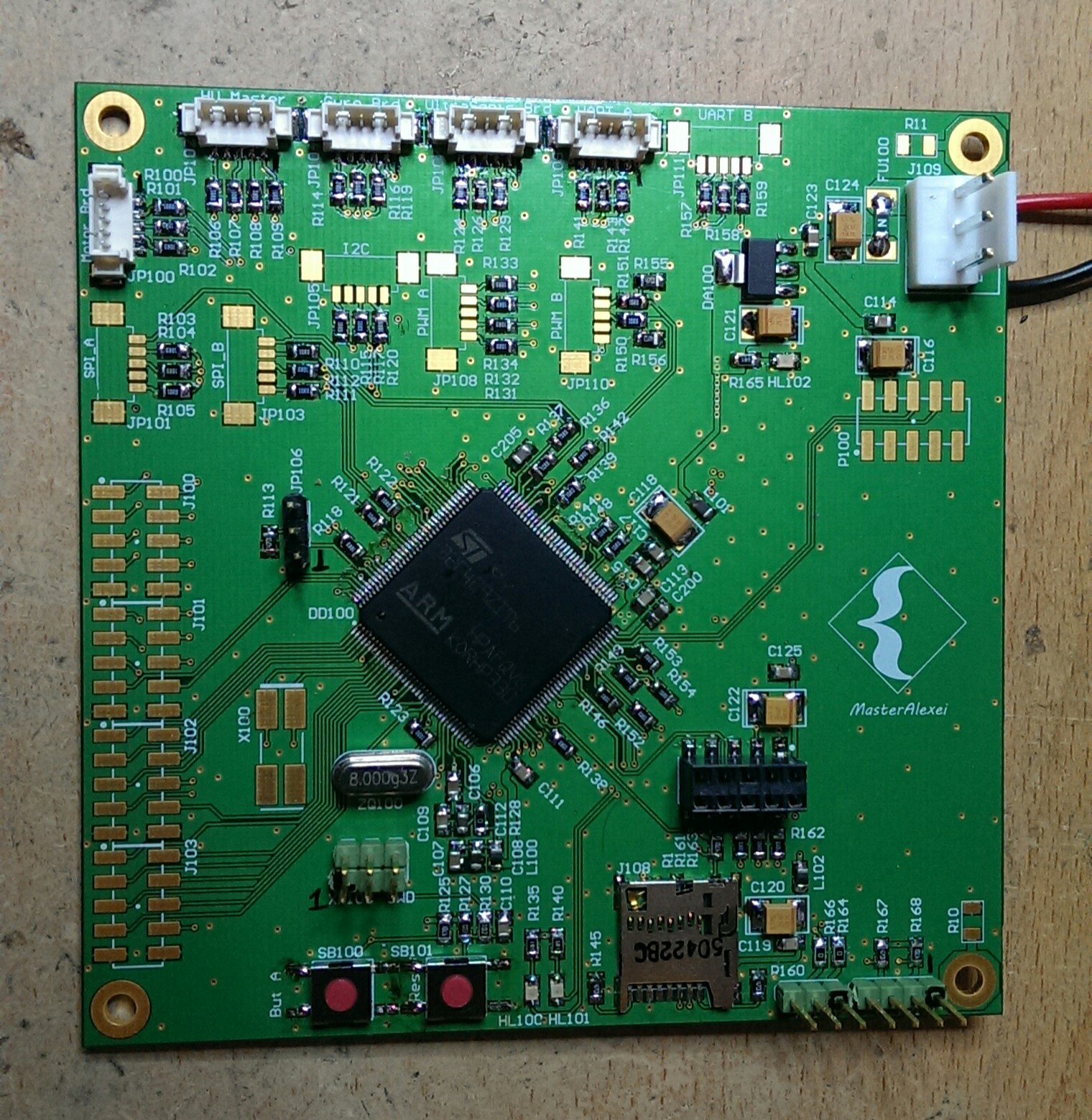
Сердцем вездехода будет у нас STM32F429ZIT6. На плате только он и куча интерфейсов. В основном это UART-ы и SPI-и. Так же влепил ему SD карточный штекерок. Почему то вот подумалось, что лишним не будет. И вправду — оказался не лишним, так как забыл EEPROM-ку спроектировать туда, чтоб хранить всяческие настройки. Ну да оно и к лучшему. Помимо настроек, на карточку можно кидать логи всяческие, там, пройденный путь да всякую другую инфу. Пока там только настройки хранятся. На данный момент я не все штекера напаял на плату, потому как пока что мне они все не понадобятся, а купил я не все. Так что вот такая вот полупустая платка вышла. Ну чтож. Сердце есть. Надо бы и «мышыцы» - блок управления моторами:
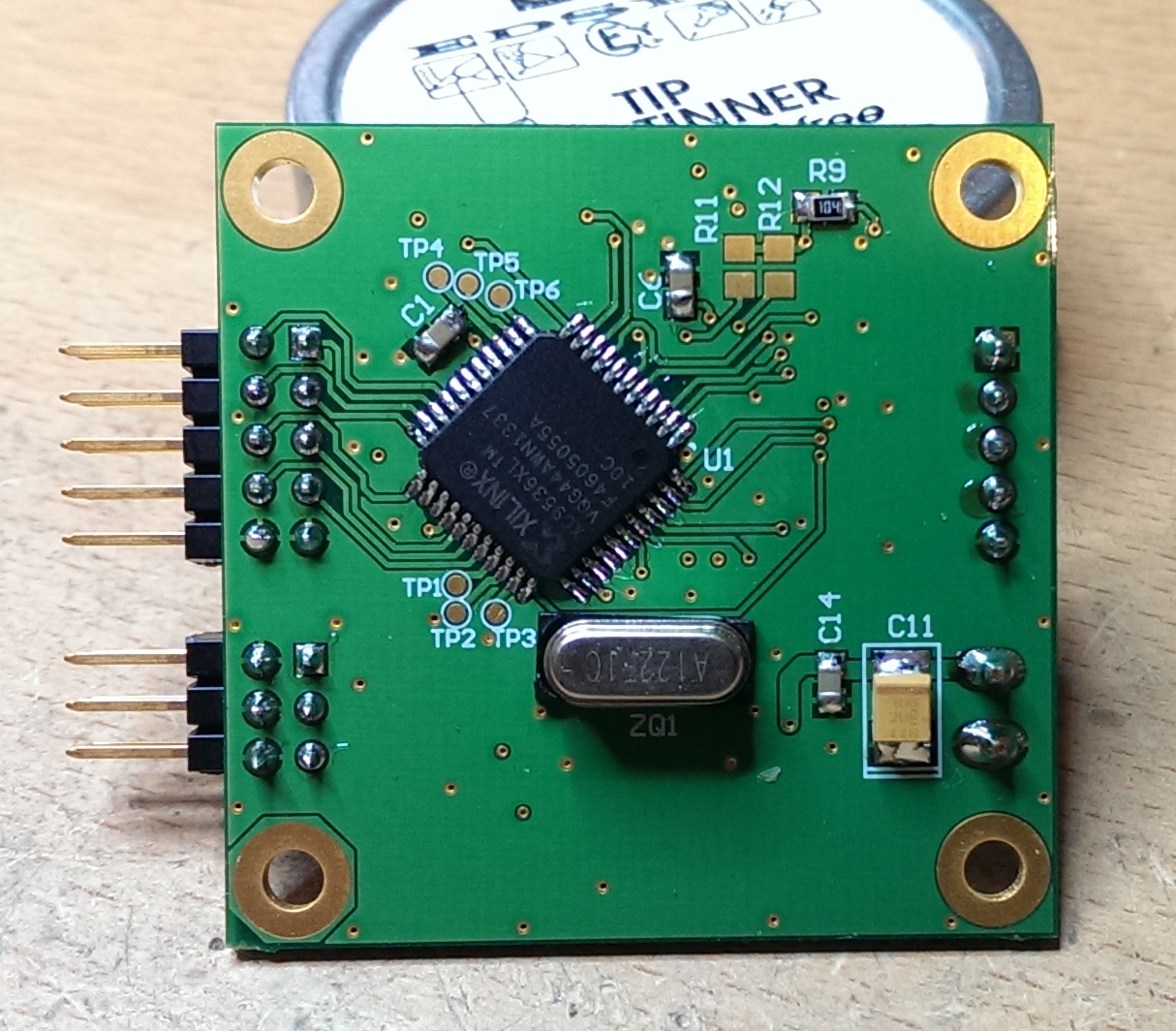
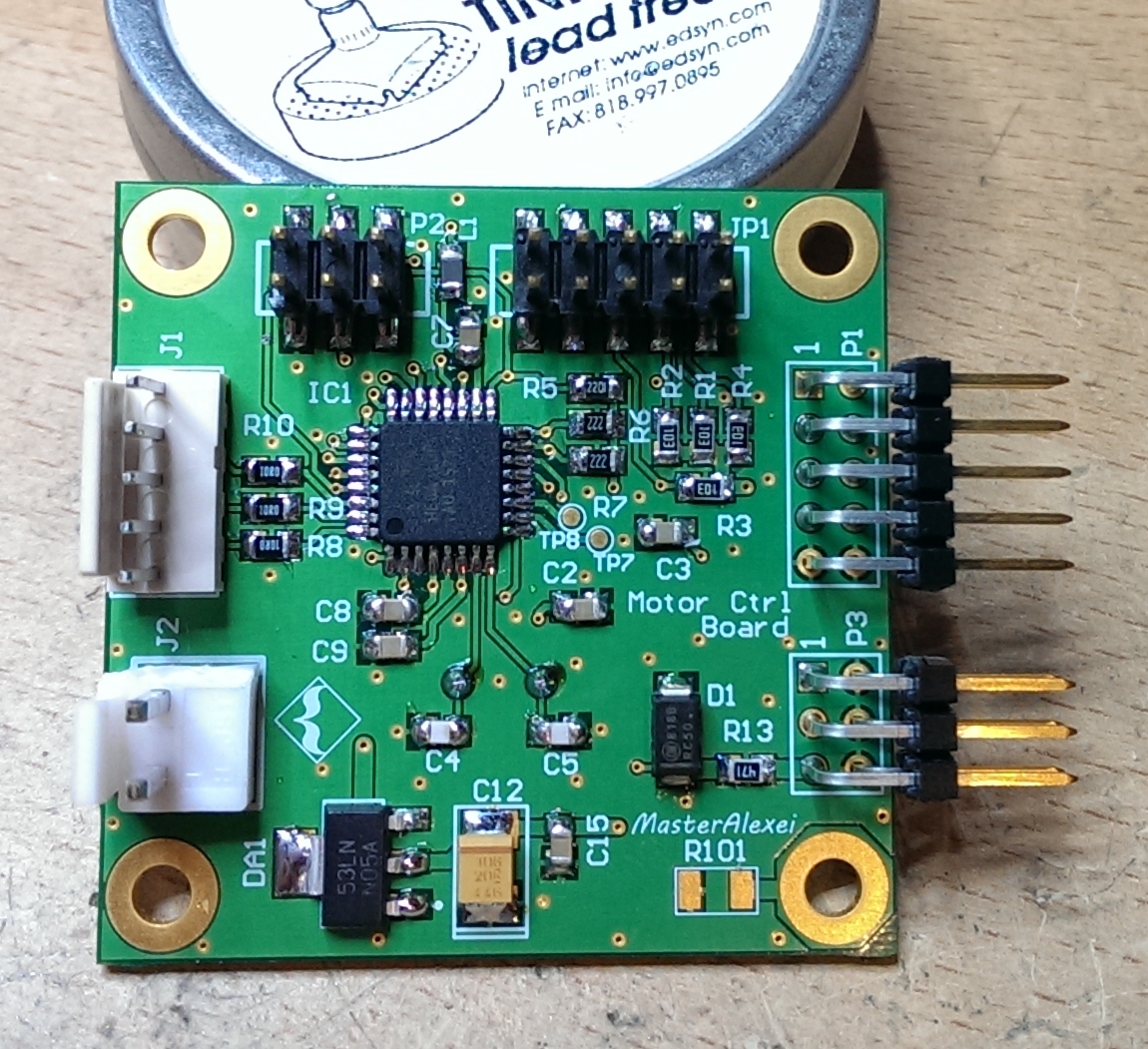
У меня тут завалялась пара ATMega88-х контроллеров, ну я и подумал, почему бы и нет. Но так как сами моторы подключаются к уже спаянному H-мосту (его видать на фотке первой примерки ), и моторов два, то для управления мостами надо было бы успеть довольно быстро коммутировать 8 пинов, и желательно синхронно. Ну я подумал, подумал, что в софте это делать как то муторно, и решил пойти другим путем — оставил мегу для основной логики задания направления и скорости, а коммутацию моста с МОСФЕТами отдал CPLDе Xilinx XC9536XL, Т.е. в меге я генрю PWM (2 штуки) и направление (2 штуки), итого 4 линии всего. Причем PWM ы генерятся аппаратно, что дает некоторую синхронность.
Вот такой модулек получился.
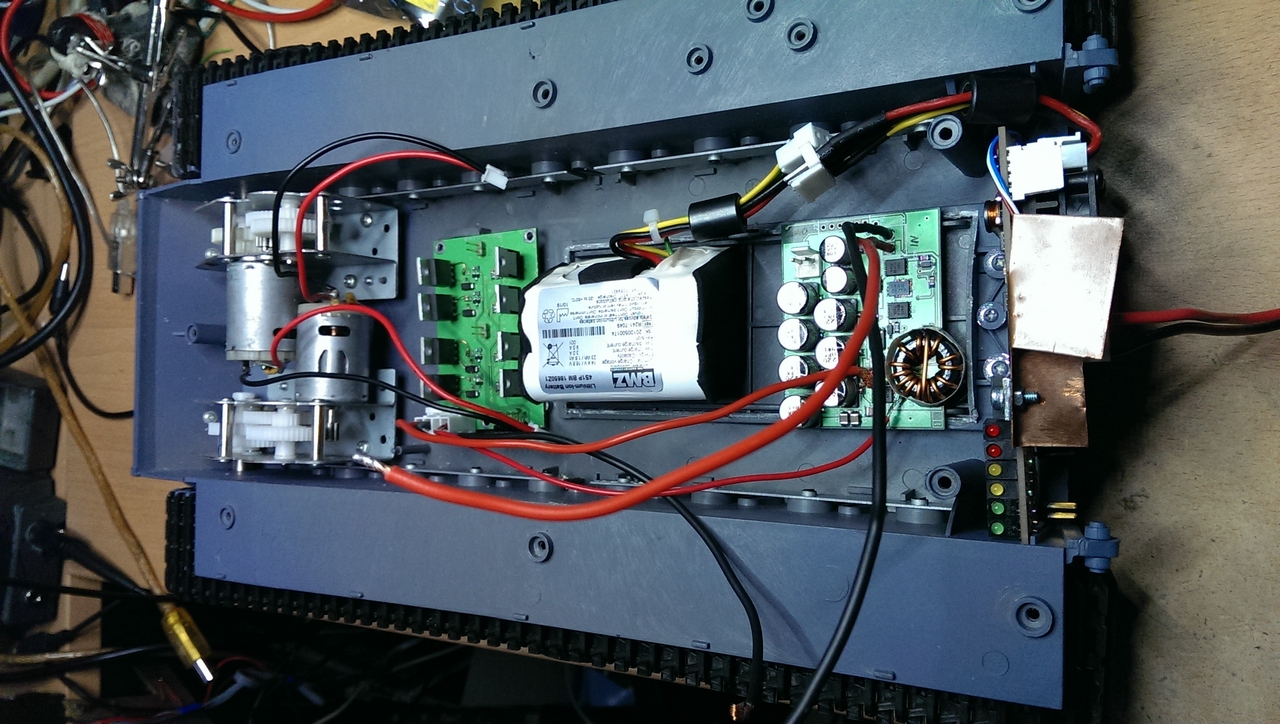
Собираем все это в одну стоечку:
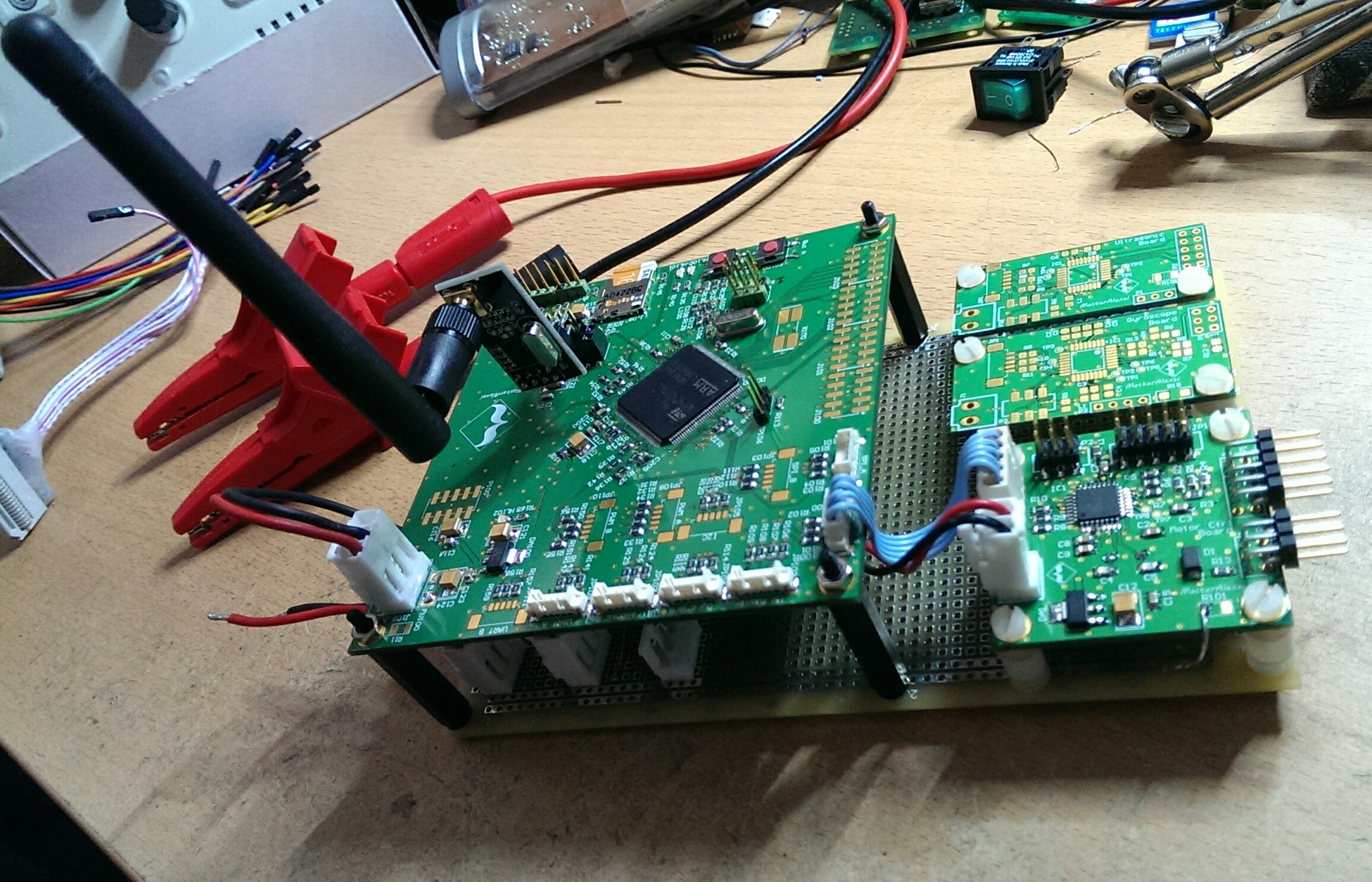
И проверяем, как оно работает вместе:
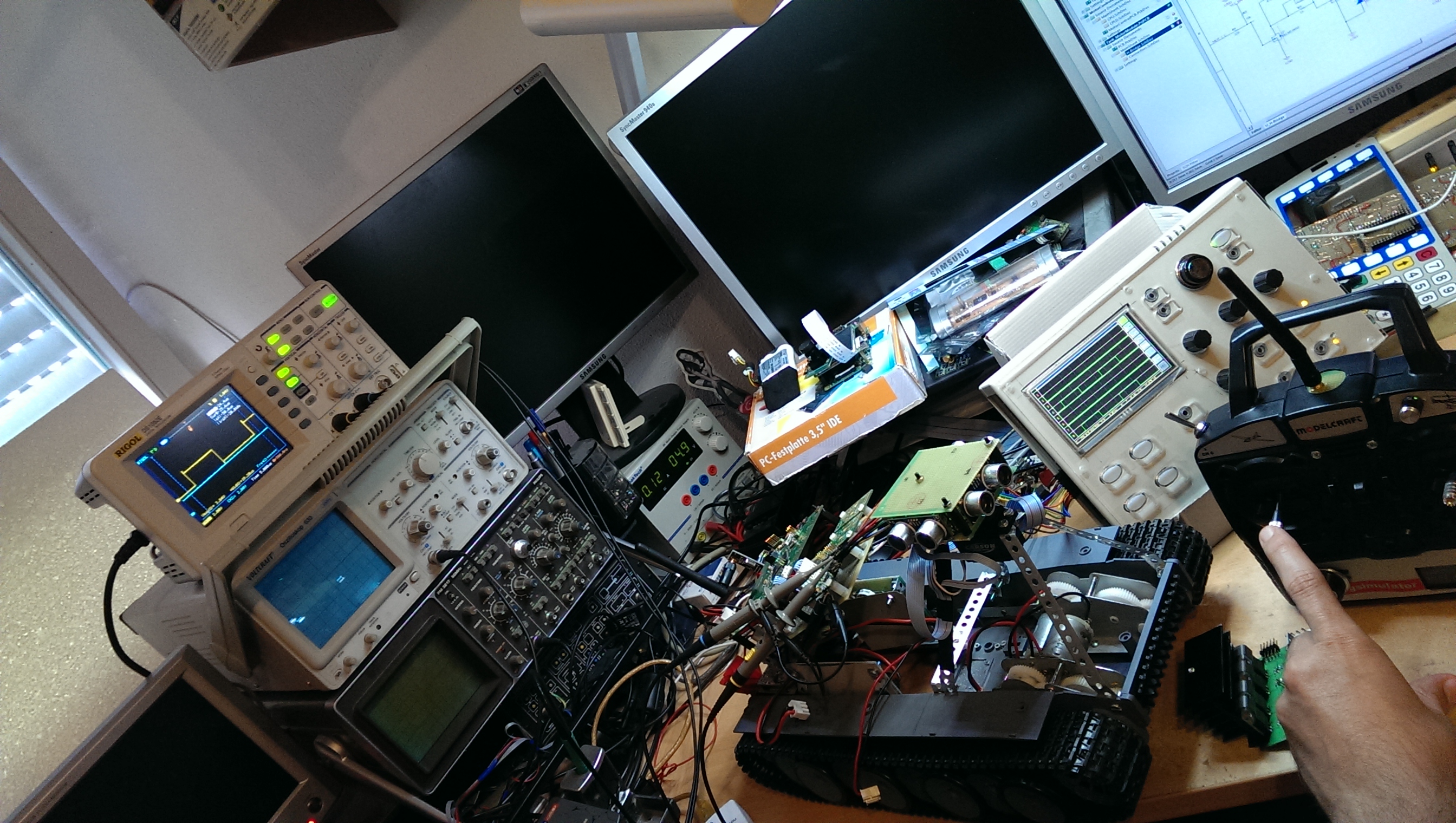
На этой фотке можно видеть в работе мой логический анализатор, упомянутый вскользь тут. Есть кое какие косяки у него еще, но можно уже и извлечь пользу, что я и сделал, проверив работу управления мостами моторов, когда сжег три МОСФЕТика 🙂 .
Еще на этой фотке можно видеть хитрую конструкцию на самом вездеходике. Это следующий шаг, который уже начат. А именно — ультразвуковой датчик расстояния.
Поискал в интернетах про всякие датчики, и остановился на простеньком HC-SR04.
Но я подумал, что скучно как-то смотреть всегда в одну сторону. Покумекал, и... поставил 4е таких, благо на амазоне их продают по смешным ценам:
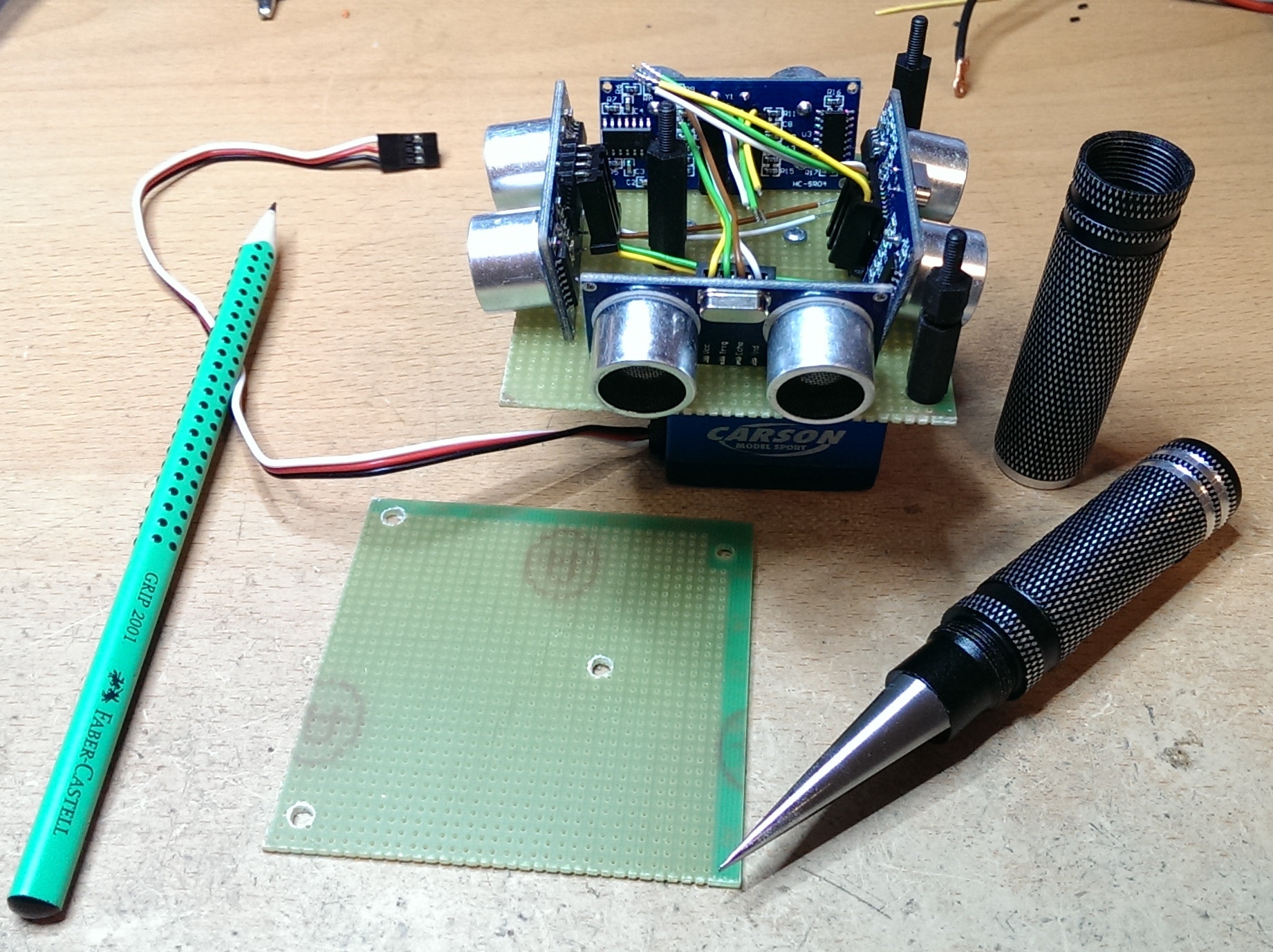
А чтобы совсем не скучать, поставил это все дело на Серву, и заставил крутиться на 15-17 градусов туда-сюда.
Вот тут вот заснял видео, как оно крутится и даже шлет данные, пока что только в комп.
Ну и вот так оно все это выглядит в сборе.
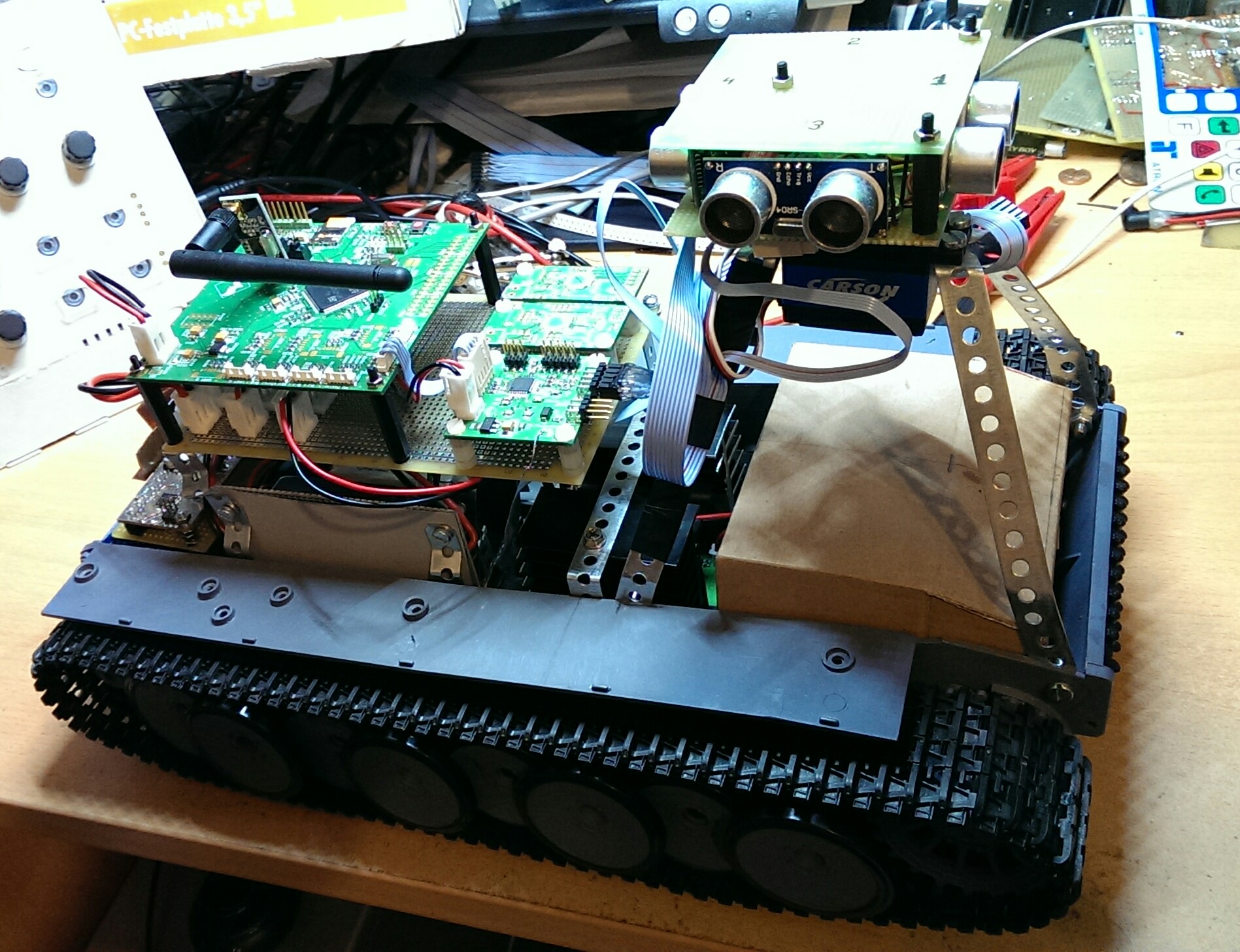
Сами моторчики я закрыл картонкой, так как закидал шестеренки смазкой, а когда они крутятся, смазка имеет обыкновение разлетаться во все стороны.
Вот. Вот тут вот можно поглядеть видео, как это все хозяйство ездит. Правда пока без башни с ултразвуком, так как пока настраивал мосты, пожег мосфеты, то пришлось ее убрать, для быстрого доступа к платке мостов. Там же на инстаграмме я повыкладывал побольше фоток и видео всяческих как с этого проекта, так и с других моих проектов и не только.
Вот пока такие вот вести с полей, так сказать.
Пошел делать следующие шаги. Какие именно, пока не скажу, чтоб не сглазить. Потом расскажу. Ну и в инстаграимме буду периодически выкладывать промежуточные стадии.
Будет интересно!
До скорого!



June 1st, 2016 at 18:53
Прикольно, тоже такая мечта была.
Сразу подумал про NRF24l01 в пульт...
Сейчас пульт для плеера сделал на nrf